KICKOFF | Tuesday, September 22nd | 6PM - 7PM (EST)
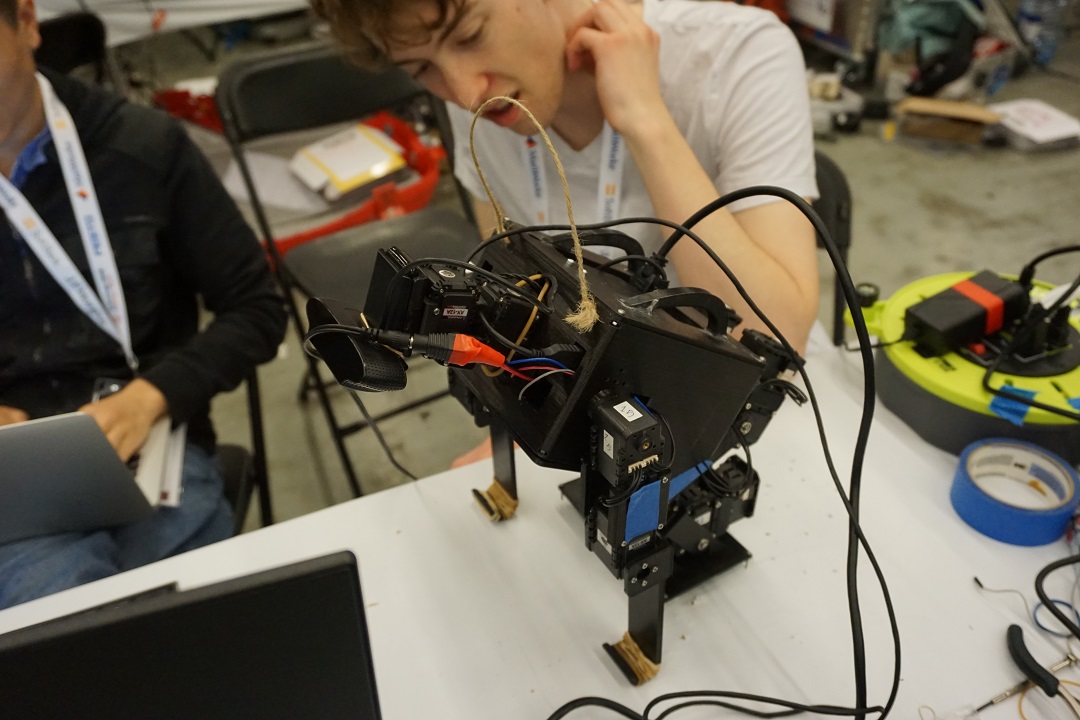
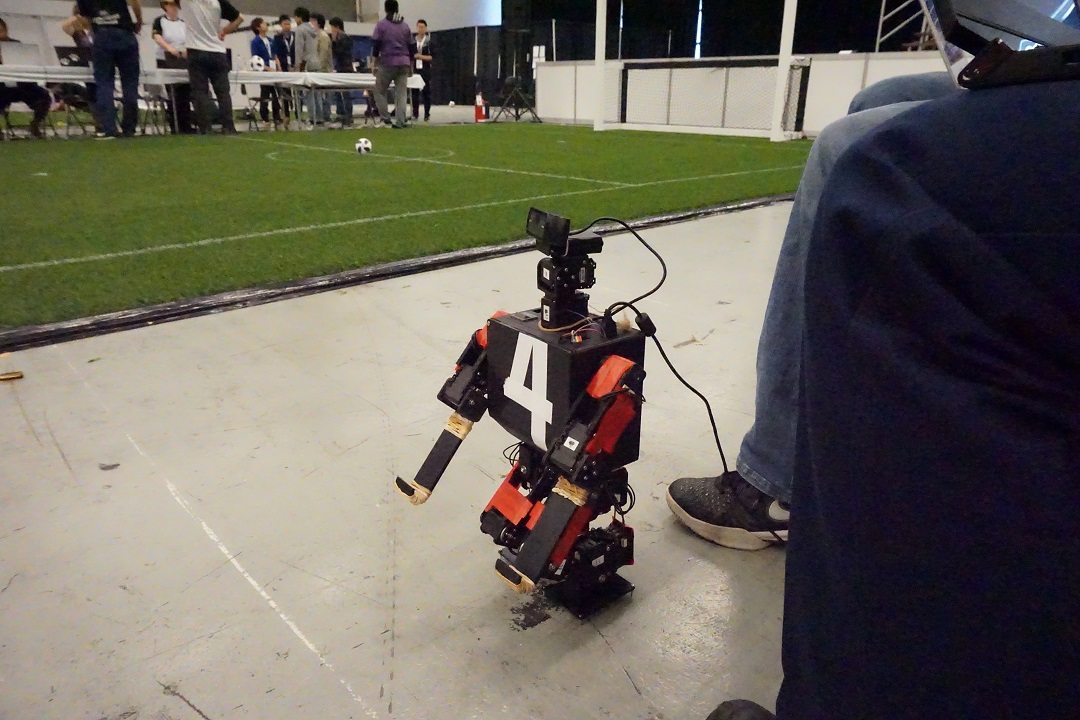
The UTRA Robosoccer team designs and builds autonomous humanoid soccer-playing robots. Standing over 60 cm tall, these robots will be able to dynamically walk, run, and kick a soccer ball while maintaining balance. Using self-localization, the robots are able to have a visual perception of the field and players around them. The UTRA RoboSoccer team intends to teach its members how to design and manufacture modular and dynamic robots, develop firmware on 32-bit ARM-based microcontrollers using FreeRTOS, develop and test bipedal controls, and use ROS and Matlab to develop computer vision and strategy algorithms.

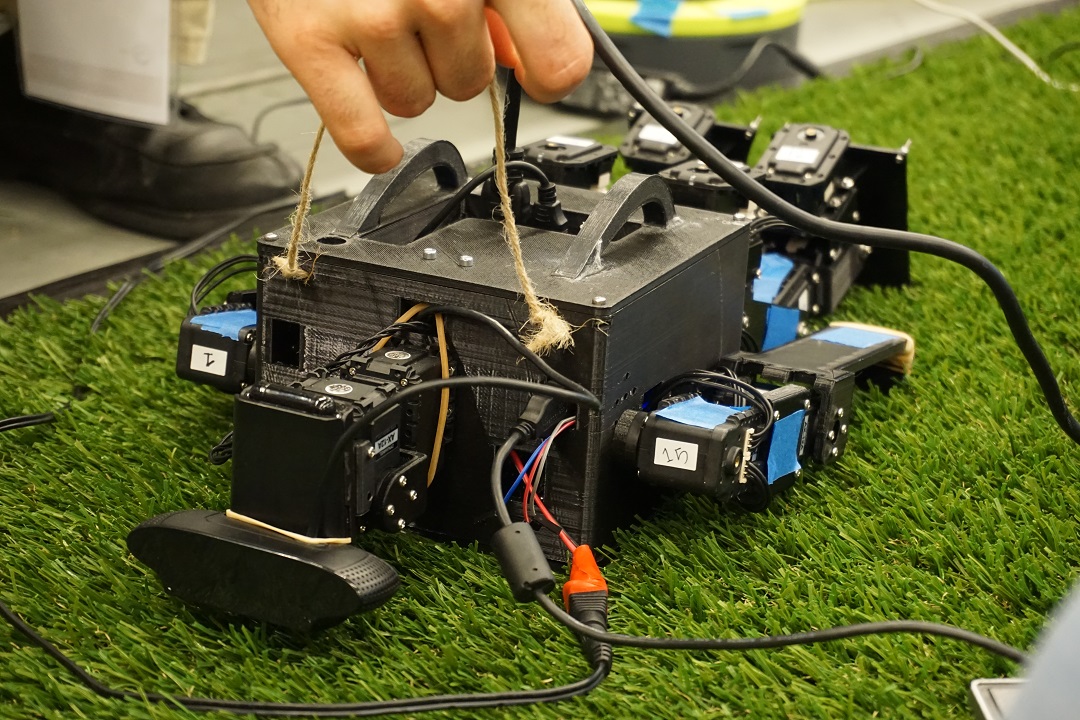
Logitech C920 Webcam
Jetson Tx2 "Brain"
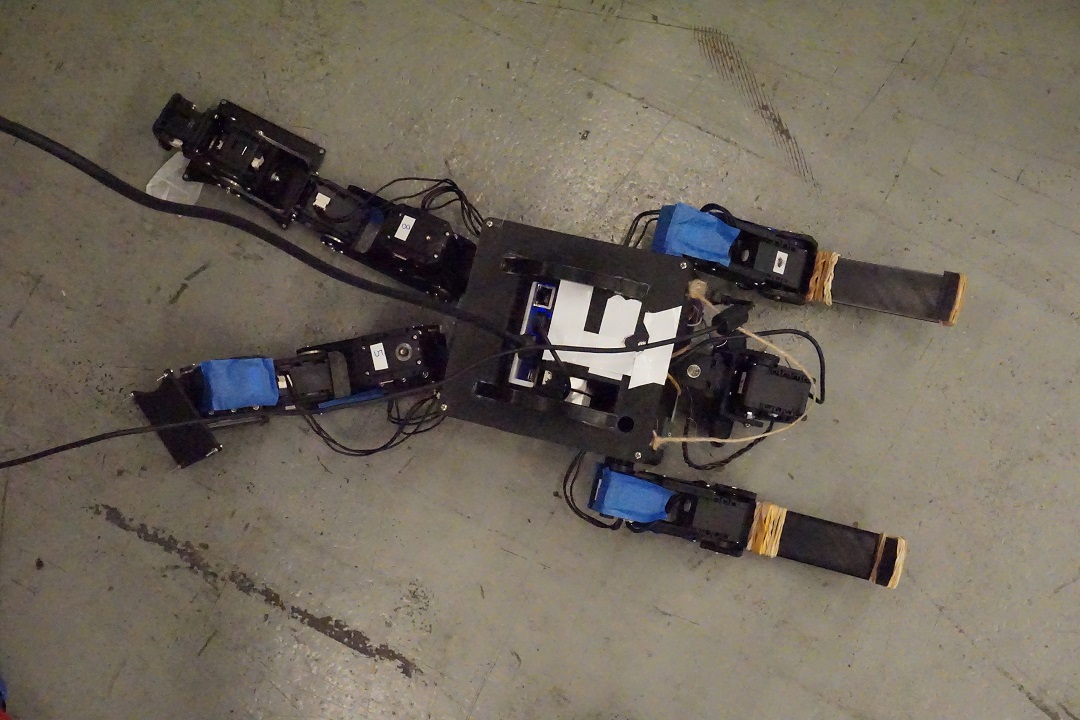
Fully 3D Printed
18 degrees of freedom
MX28T & AX12A Dynamixel Servo Motors
Initial efforts to create this new branch within UTRA began summer 2016. However, it was not until summer 2017 that we were well-defined and the creation of our robots from scratch began. Following some recruitment around that time, our team had a small number of members split across three subsystems: mechanical, electrical and software. Later that summer, the embedded subsystem (microcontroller software), emerged out of the electrical subsystem, and the control subsystem was formed to focus on bipedal locomotion. By the end of 2017, our team grew to more than 20 members, all engineering undergraduates at the University of Toronto. Around that time, we were highly focused on achieving the basic requirements to qualify for the 2018 RoboCup competition in Montreal that upcoming summer. Some of each of our subteam's achievements and activities are summarized below: